安装建议
机械固定、减震方式与上电自校准注意事项
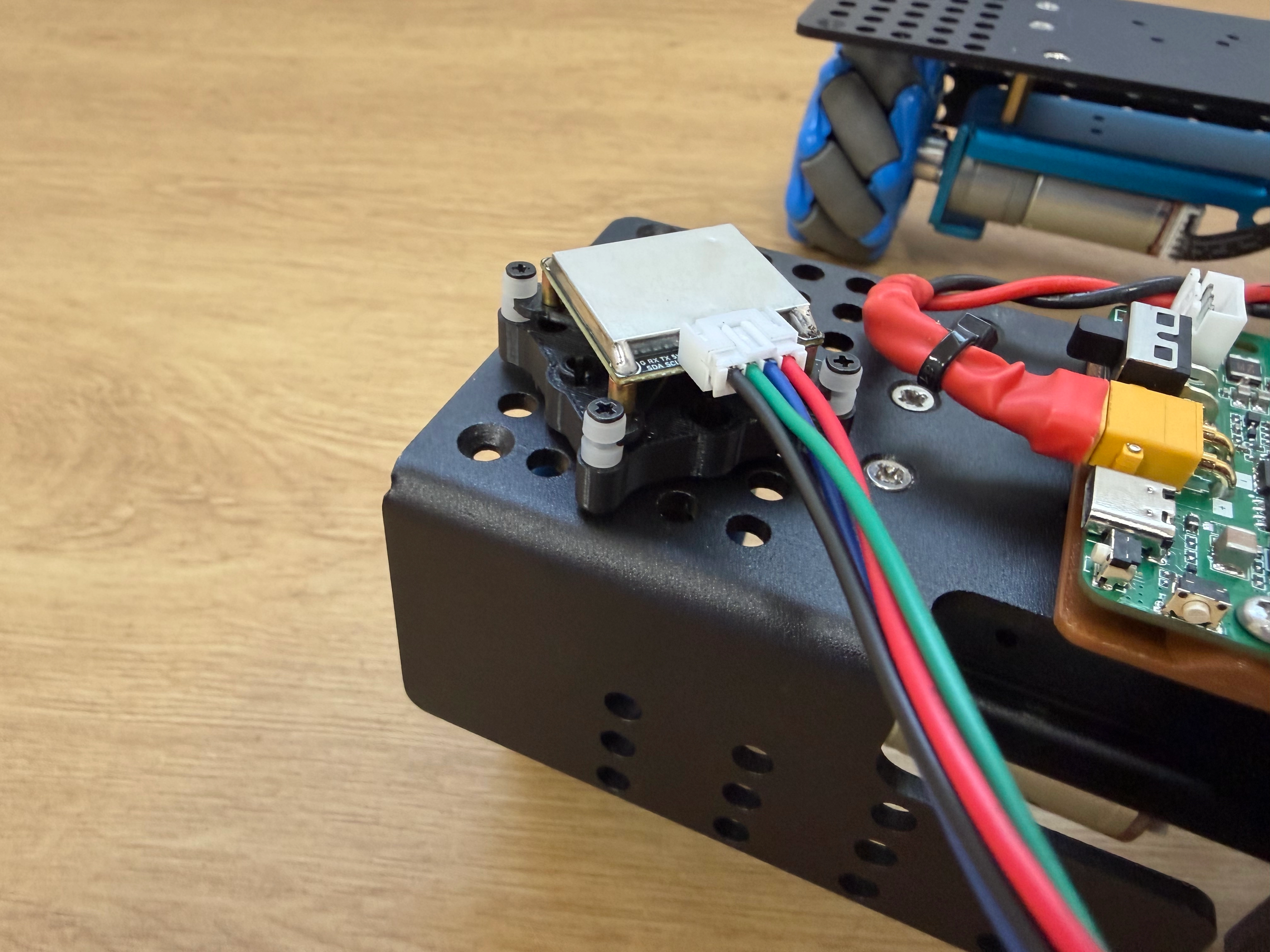
本页重点说明 DeDeIMU 的机械安装方式。对于 IMU 来说,安装质量会直接影响姿态稳定性与校准结果,因此建议优先按本页的思路进行结构设计。
固定方式
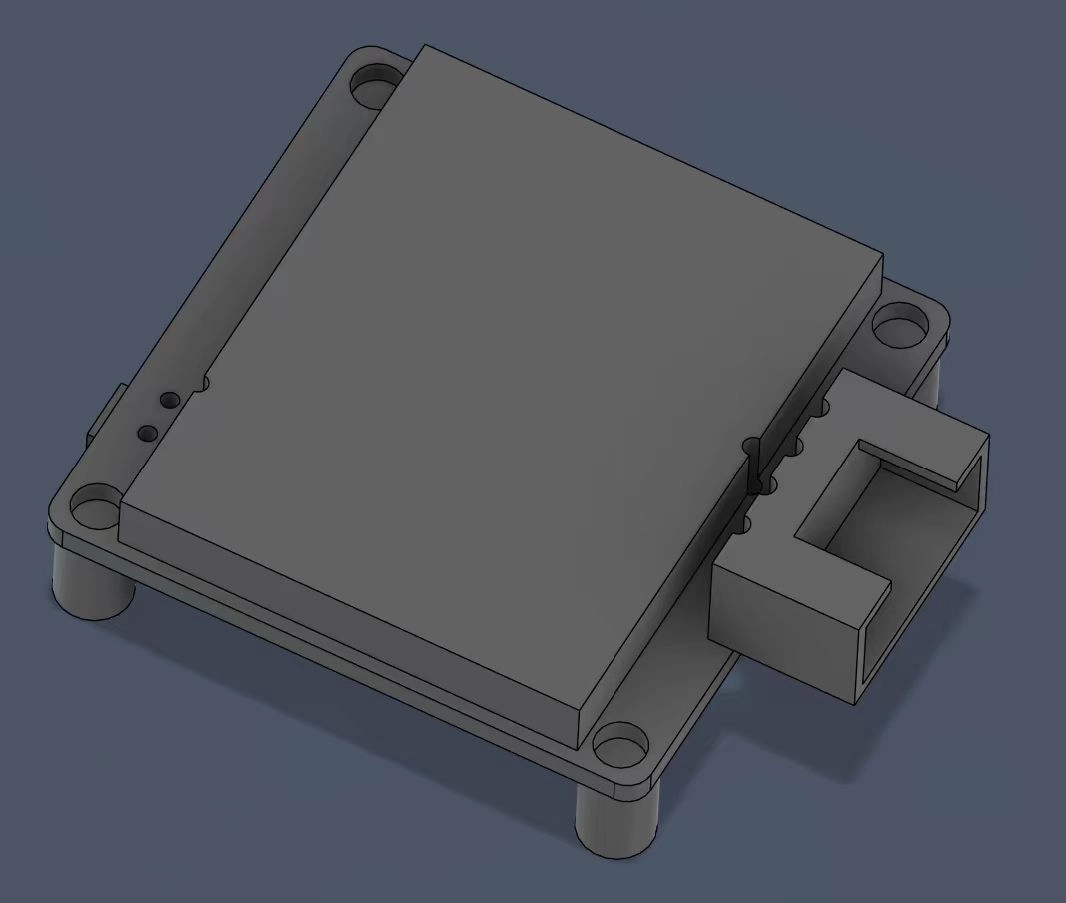
- 陀螺仪本体模型: V1-陀螺仪模型.step
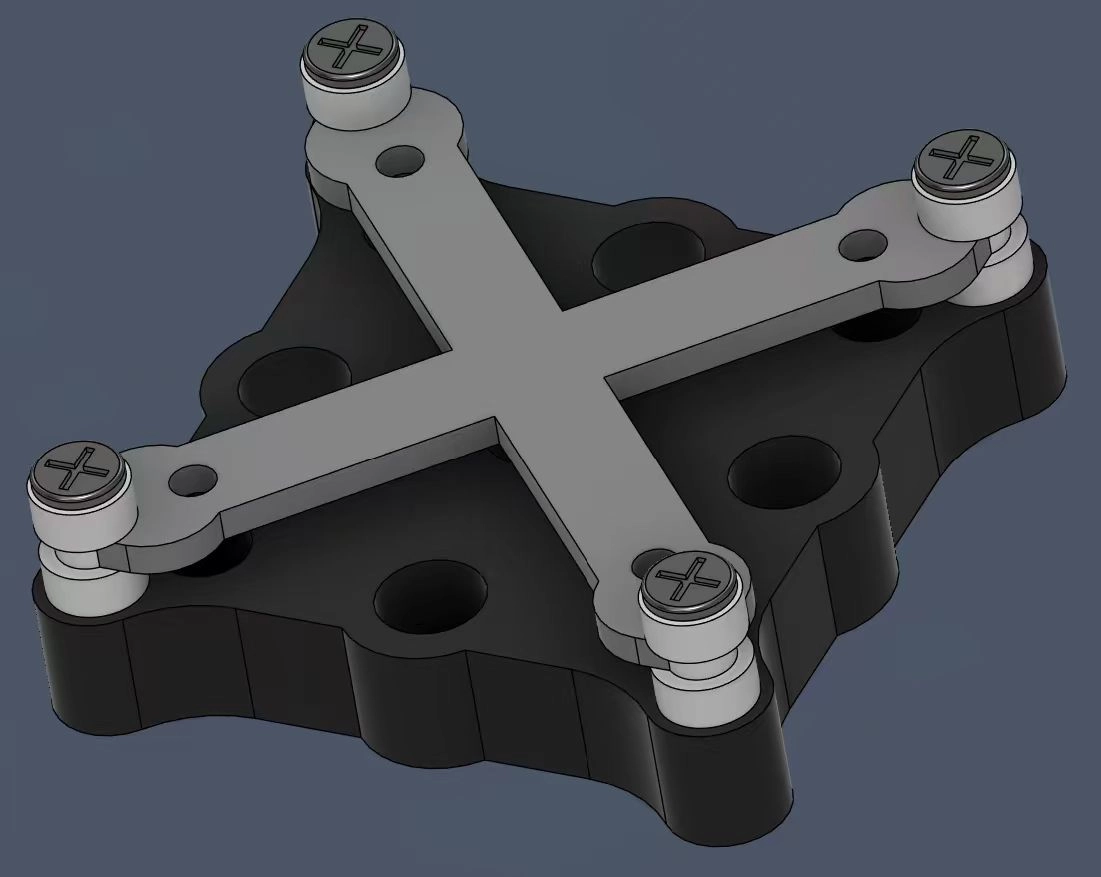
- 固定支架参考模型: V1-陀螺仪支架.step
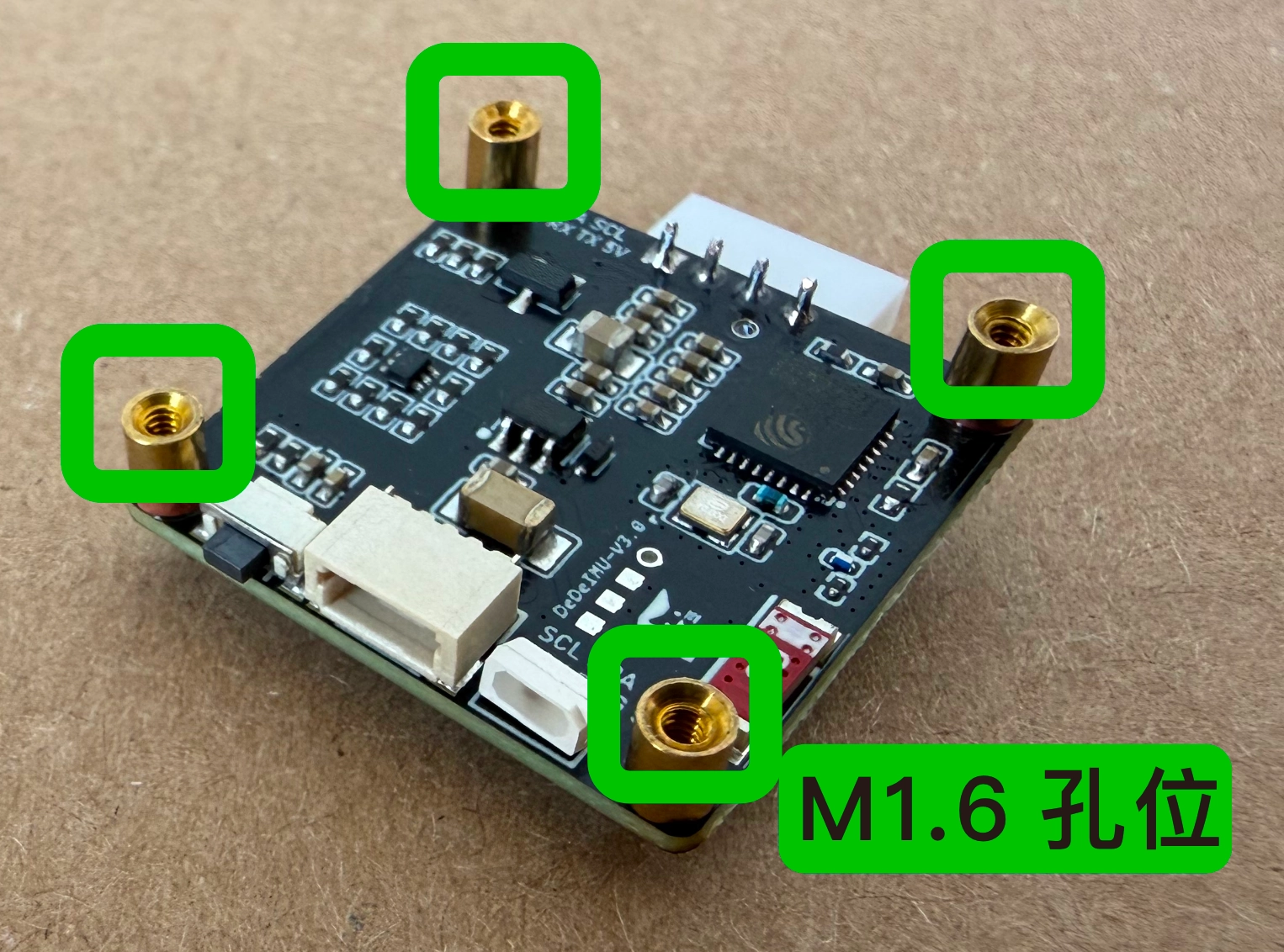
- 底部安装螺丝规格为
M1.6。 - 常用螺丝长度可从
4mm或6mm开始选型,再根据板厚和支架厚度调整。
推荐安装原则
- 尽量保持模块安装面平整、稳定,不要悬空在容易共振的位置。
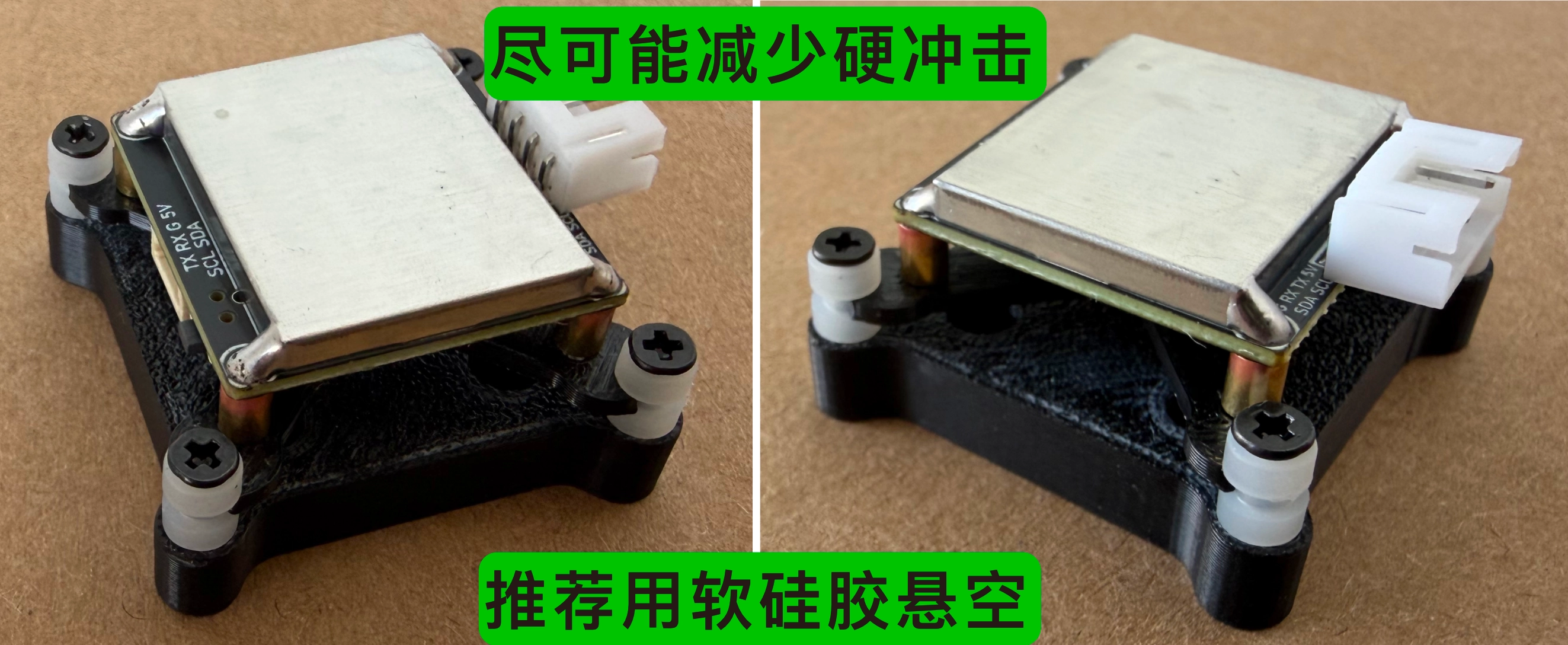
- 若设备会受到冲击、震动或落地振动,建议增加硅胶或弹性结构做减震。
- 你的目标不是“完全隔离振动”,而是在硬冲击出现时,尽可能降低瞬时冲击峰值。
- 硬冲击容易让 IMU 短时间超出测量范围,从而放大姿态误差。
推荐硅胶参考: 减震硅胶示例链接

车体安装建议
- 安装到小车或移动平台时,同样建议优先选择刚性较好且相对平稳的位置。
- 模块支架与车体之间若能再增加一层硅胶减震,通常能进一步降低冲击带来的数据扰动。
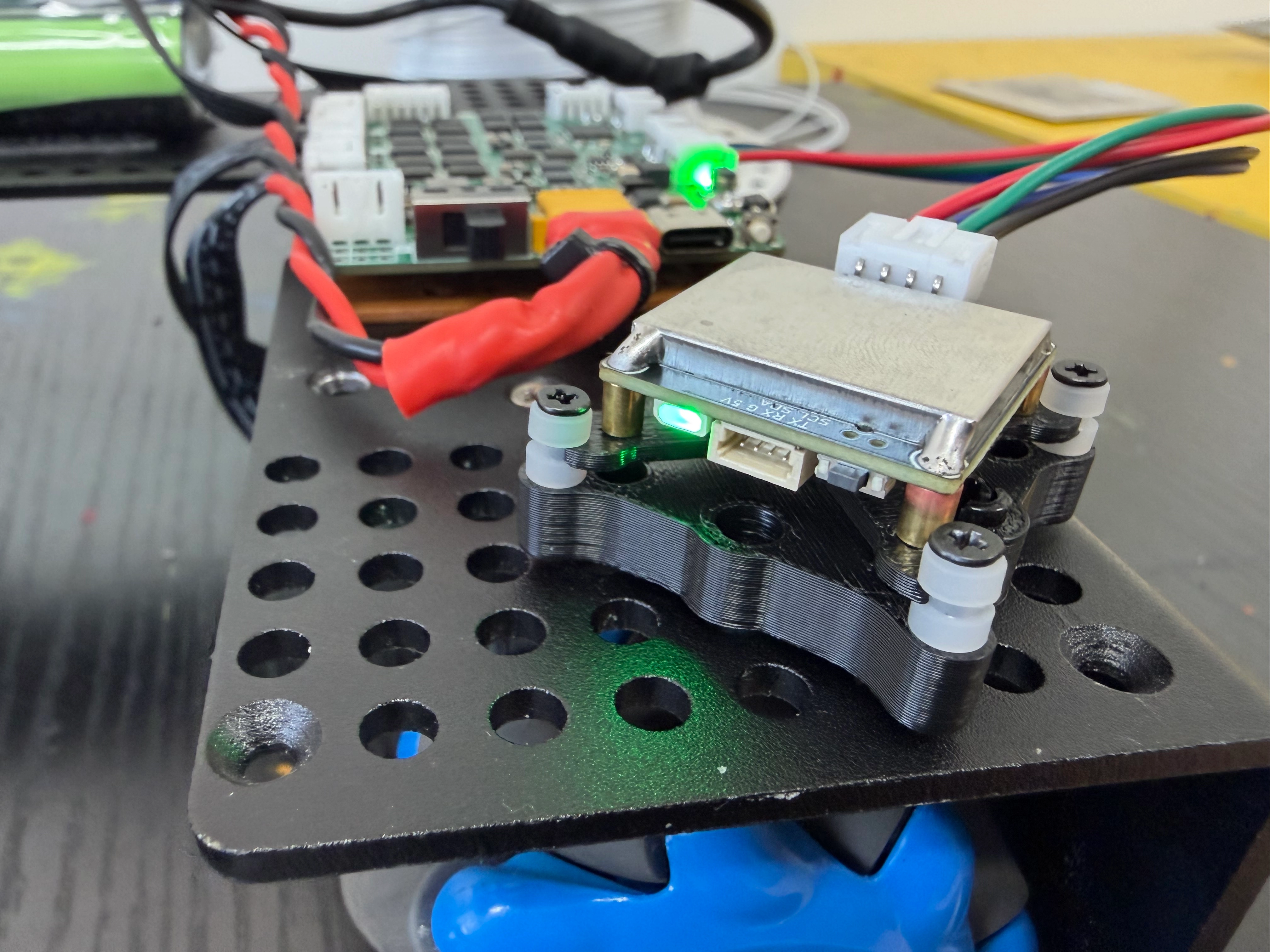
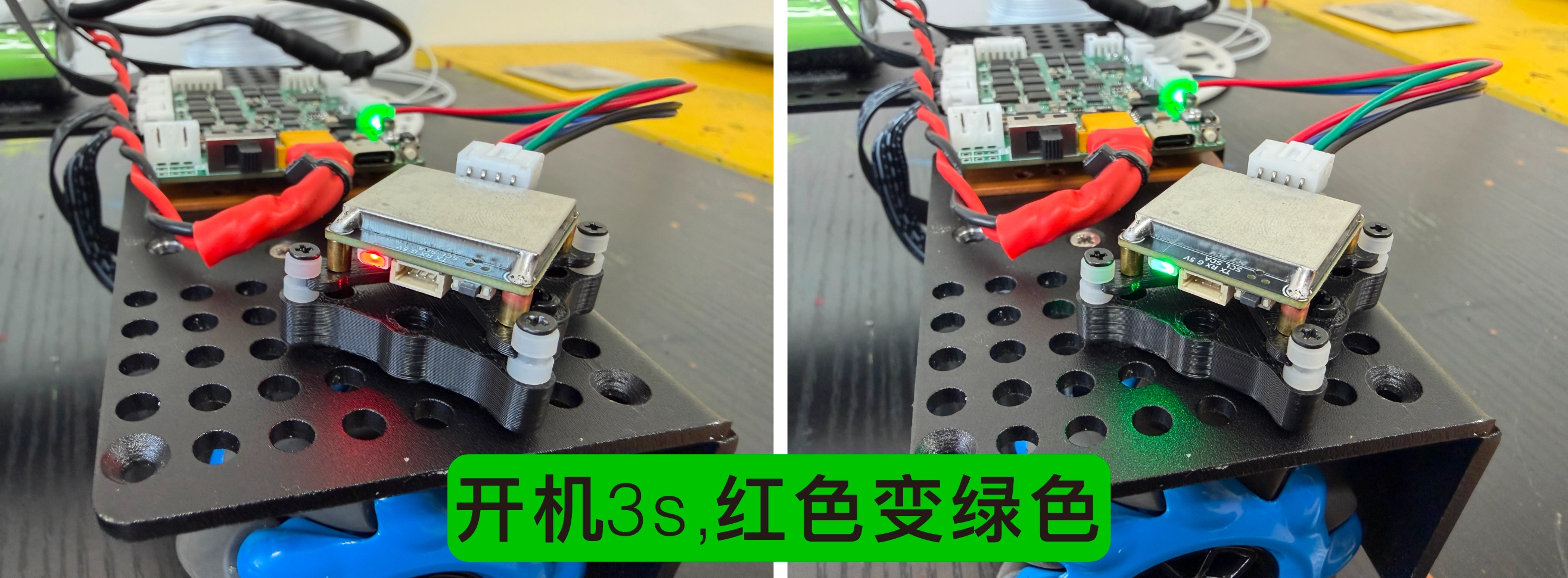
上电自校准
- 模块上电后会先进入约
3 秒的自校准阶段。 - 此阶段状态灯为红色,请不要移动模块。
- 等待状态灯切换为绿色后,再开始读取数据。
- 这个阶段会获取环境温度并完成初始修正,因此静止等待非常重要。
安装完成后的建议动作
首次安装后,建议先查看实时姿态数据是否稳定,再决定是否需要重新做加速度计校准。